Рассматривается использование разработанного программного комплекса для моделирования амфибийных судов на воздушной подушке (АСВП) с гибким ограждением классического типа.
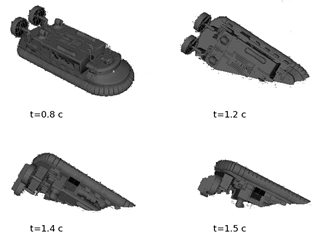
Рис. 1. Визуализация положения судна при перевороте.
Используемый программный комплекс позволяет производить разработку моделей подсистем по отдельности и автоматически преобразует отдельные модели в общий комплекс (комплексную модель).
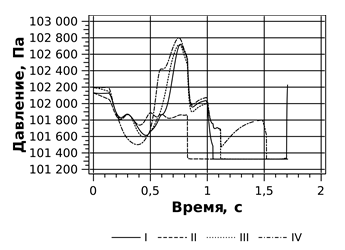
Рис. 2. Распределение давлений в подушке.
Математическая модель допускает исследование АСВП с различными конструктивными решениями и характеристиками. Ниже описан конкретный пример моделирования в рамках разработок по ОКР «Север».
Центральной частью модели является модель динамики твердого тела, соответствующего жесткому корпусу АСВП. Внешние по отношению к корпусу силы создают движитель, рули, воздушная подушка, аэродинамическое и гидродинамические сопротивления. При расчете движителя − вентилятора учитывается затенение от корпуса, аэродинамические рули описываются по теории крыльев. Воздушная подушка создается при помощи центробежных нагнетателей и гибкого ограждения (ГО). Динамика и изменение избыточного давления воздуха определяются дифференциальными уравнениями с учётом расхода нагнетателей, расхода через зазор ГО. Подъемная сила создается этим избыточным давлением. В данном случае рассматривается ГО с передней частью в форме полукруга, и разделенное на 4 секции, имеющих равную площадь в горизонтальной проекции, причём в ГО каждой секции имеются отдельно движущиеся навесные элементы, общее число которых равно 60. Для каждой секции имеется отдельный нагнетатель, который моделируется в соответствии с методикой. Геометрия ГО (в том числе площадь зазоров под навесными элементами) определяется относительным положением корпуса АСВП и подстилающей поверхности (твёрдой, водной…). Расход через зазор для каждого навесного элемента определяется по формулам для расхода через щель с учётом экспериментального коэффициента расхода воздуха.
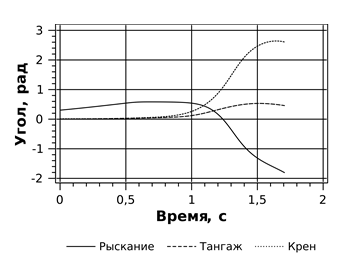
Рис. 3. Углы поворота судна.
Аэродинамическое сопротивление подразделяется на несколько компонент. Профильное сопротивление корпуса АСВП рассчитывается с аэродинамическим коэффициентом, в данном случае равным 0.4. Учитывается эффект сопротивления струй воздуха, выходящего из-под гибкого ограждения, и импульсное сопротивление. Гидродинамическое сопротивление подразделяется на сопротивление волнообразования и т. н. остаточное сопротивление, включающее в себя сопротивления брызг, замывание навесных элементов ГО и др. Эти компоненты рассчитываются по эмпирическим формулам. Двигатели внутреннего сгорания описываются с учётом инерционности ротора и лопастей с учётом КПД, задаваемого по паспортным данным. В комплексной модели также присутствуют модели управления (ПИД-регуляторы) и модели, реализующие расчет вспомогательных параметров, таких как мощность отдельных компонентов, углы тангажа и крена и др.
В целом комплексная модель состоит из 60 моделей компонентов различной сложности, 25 интегрируемых переменных, и около 200 переменных, определяемых алгебраически, между компонентными моделями 187 связей. На поздних стадиях оптимизации АСВП подробные модели подобранных лопаточных машин были заменены на интерполяции по массовым расчетам без перестройки всего комплекса в целом. На рисунках приведены результаты одной из серий расчетов, а именно моделирование аварийной ситуации − переворот АСВП при повороте на высокой скорости.